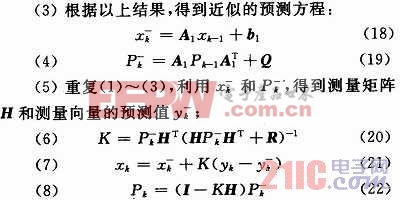
1.3.2 算法流程
將加權最小二乘線性化方法同KF算法相結合,便得到了WLS-KF算法���。具體的算法流程如下:
(1)設置矩陣A,b和加權矩陣W��;
(2)將A�����,b和W帶入式(17),求出線性化系數矩陣A1����,常數向量b1;
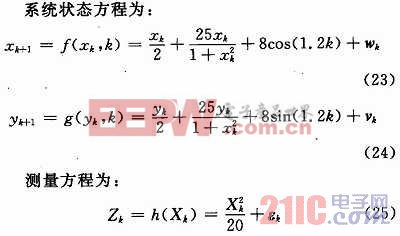
2 實驗結果與分析
基于運動載體為質點的假設建立目標運動模型���,考慮一個二維平面曲線運動系統(tǒng)�����,狀態(tài)定義為
 �,分別表示二維方向上的位置變量����、速度變量、載體相對于起始位置的轉彎角度及接收機鐘差��。
�,分別表示二維方向上的位置變量����、速度變量、載體相對于起始位置的轉彎角度及接收機鐘差��。
濾波器相關文章:濾波器原理
濾波器相關文章:濾波器原理
電源濾波器相關文章:電源濾波器原理











評論